RoadNN
识别裂缝
《One Application of Neural Networks for Detection of Defects using Video Data Bases: Identification of Road Distresses》
主要是预处理部分:从阈值到像素组合成object;NN只是用来分类纵横裂纹。
由于图片中不同位置的背景路面的灰度不尽相同, 需要通过局部阈值来提取裂缝;
将图片分割为40*40 pixels的小块,称小块的灰度平均值为$m$、灰度标准差为$\sigma$,
e=∑ec∑ec×v
$e_c$为小块内每个像素与它邻近像素的最大偏差值,$v$为中央像素的值;
使用两个阈值:
v1=min(m−a1×σ,a2×e)v2=min(m−b1×σ,b2×e)
系数a1,a2,bl,b2根据经验设置; $v_1$用于选择暗像素,$v_2$用于选择黑色或很暗的像素。
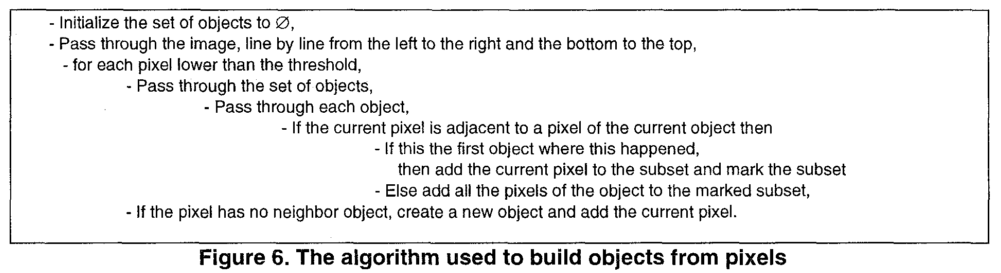
neighborhood=d×size1×size2a
根据距离聚合像素,组成object:
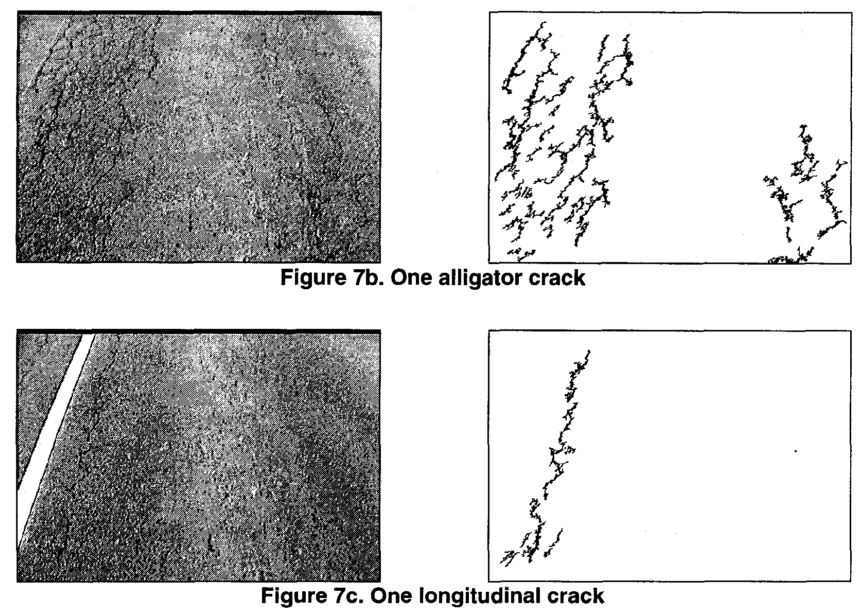
之后对裂缝类型进行分类:纵、横、龟裂