背景介绍¶
在许多实际应用中,我们需要解决的关键问题是如何对多个彼此关联的变量进行预测。譬如自然语言处理中的词性标注问题,或者机器视觉里的图像标注任务,抑或是对DNA链上基因的分割。1 在这些应用中,我们希望通过观测到的特征向量 \mathbf x 来预测由随机变量组成的输出向量\mathbf y=(y_0,y_1,\ldots,y_T)。图模型很自然地建立了实体之间的结构化关系,因而被用于表示联合概率分布p(\mathbf y,\mathbf x)。
本文的研究背景是像素级的图像标注任务,这里\mathbf x=(x_0,x_1,\ldots,x_T)表示一张大小为\sqrt T \times \sqrt T的图片,每个x _i都代表一个像素。为使问题简化,这里考虑黑白图片,则x _i为取值范围0~255的实数。每个y _i就代表该像素的标签(label),比如我正在做的路面裂缝识别任务中,标签就只有两种:+1代表裂缝,0代表正常路面。
假设图G=(V,E),其中V={X_1,X_2,\ldots,X_N},全局观测为I。使用Gibbs分布,(I,X)可被建模为CRF
\varphi_p(x_i.x_j)是对 i、j 同时分类成x_i、x_j的能量。

接下来的内容安排为:第二章首先引入条件随机场的概念,之后举例说明其与其他模型的区别,最后从原理上介绍它在图像标注中的应用;第三章则是近年来相关工作的简要阐述。
二、条件随机场¶
2.1 概念引入¶
- Y:一系列随机变量的集合;
- 概率图模型:无向图G=(V,E)表示概率分布P(Y),节点v\in V表示一个随机变量Y_s,s\in1,2,\ldots|Y| ;边e\in E表示随机变量之间的概率依存关系;
- 概率无向图模型:如果联合概率p(Y)满足成对、局部或者全局马尔科夫性,就称该联合概率分布为无向图模型,或者马尔科夫随机场。最大特点:易于因子分解。这里的随机场指的就是由无向图定义的特定分布。
indicator function:
条件随机场(conditional random field,以下简称CRF):假定我们关心的概率分布p可以通过A个形如\Psi_a(\mathbf y_a)的因子(factor)的乘积来表示。
其中Z为规一化因子,使得p(\mathbf y)在0~1。
这些factor也称做local function或compatibility function。而在图中,与因子节点(factor node)\Psi_a相连的所有变量节点(variable node)Y_s都是\Psi_a的参数之一。所以factor graph描述的是分布p分解为一系列local function的方式。
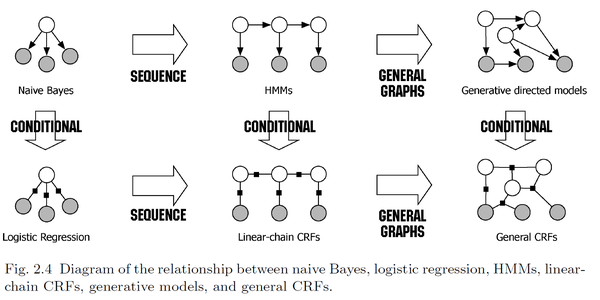
2.2 判别式模型和产生式模型¶
通常看到一个新的模型,我们总习惯和已知的进行比较。朴素贝叶斯和逻辑回归模型之间的一个重要区别是,朴素贝叶斯是产生式模型(generative model),它基于联合分布p(\mathbf x,\mathbf y)建模,而逻辑回归是判别式模型(discriminative model),它直接对条件分布p(\mathbf y|\mathbf x)建模。
对条件分布p(\mathbf y|\mathbf x)建模,不包括对p(\mathbf x) 建模(p(\mathbf x)对分类来说无关紧要)。对p(\mathbf x)建模非常困难,因为p(\mathbf x)包含很多相互依赖的特征。比如在命名实体识别(Named- Entity Recognition,NER)应用中,HMM只依赖一个特征,即这个词本身,但是很多词,特别是一些特定的名字可能没有出现在训练集合中,因此词本身这个特征是未知的,为了标注未登陆词,我们需要利用词的其他的特征,如词性、相邻词、前缀和后缀等。
这里以HMM和Linear-chain CRF为例说明这两种模型的区别。
除了上面说的NER,在做词性标注任务(Part-of-Speech tagging, POS)的时候我们也常使用HMM模型,\mathbf y就是 word对应的词性(label),\mathbf x的是它的观测(word)。
- transition probability :p(y_t|y_{t-1}) 不同状态(label)之间的转移概率
- emission probability:p(x_t|y_t) 由状态到观测(word)的发射概率
首先,我们可以将HMM重写为更一般化的形式:
则与上述HMM等价。通过引入特征函数的概念:
- 对每一个转移(i,j)有f_{ij}(y,y',x)=\mathbf 1_{\{y=i\}} \mathbf 1_{\{y'=j\}};
- 对每一个发射(i,o)有f_{io}(y,y',x)=\mathbf 1_{\{y=i\}} \mathbf 1_{\{x=o\}};
- 特征函数f_k遍历所有f_{ij}和f_{io}。
这就得到了满足因子分解形式的Linear-chain CRF:
我们已经看到当联合分布为HMM的形式时,相应的条件概率分布为线性链式的CRF,在HMM中状态i到状态j的转移概率总是相同的,和当前的输入无关,但是在CRF中,我们可以通过加入特征:
来使得状态i到状态j的转移概率和当前输入有关。实际上,这也是CRF应用于图像标注的优势所在。
2.2 在图像标注中的应用¶
图像的一个重要特性是:相邻像素的标注趋向于一致。因此,我们可以通过设置一个\mathbf y的先验(prior)分布p(\mathbf y)来融入该特性,使得预测趋向于“平滑”。目前最常用的prior是马尔可夫随机场(Markov random field,以下简称MRF),它是一个无向图,且有两种因子(factor):
- 关联标签y_i和对应的像素x_i :
- 鼓励相邻标签y_i和y_j保持一致
这里用\mathscr N表示像素的相邻关系,则(i,j)\in \mathscr N意味着x_i x_j相邻。通常\mathscr N是一个\sqrt T \times \sqrt T的网格。
这里的\Psi是鼓励平滑性的因子,比较通用的设置是:
通常\alpha<1,可理解为对差异的惩罚。
MRF的一个不足之处在于难引入关系数据中的局部特征,因为这时p(\mathbf x|\mathbf y)结构会很复杂。 CRF和MRF很相似。假定q(x_i)表示基于x_i周围区域的特征向量,例如颜色直方图或图像梯度。此外,\nu(x_i,x_j)描述x_i与x_j之间的关系,从而考虑x_i与x_j的异同。 这里就可以定义\nu(x_i,x_j)为q(x_i)和q(x_j)中特征的叉积。
为了让问题更加清楚,考虑MRF中的\Psi(y_i,y_j),尽管它鼓励一致性,但方式不灵活。如果x_i x_j的 标签不同,我们会预期它们的灰度也不同,因为不同物体总是色调不同。所以相比于标签边界出现在灰度悬殊的像素之间,出现在灰度相似的像素之间更“不合常理”。然而,MRF中的\Psi对这两种情况的惩罚相同,使得能量计算和像素值无关。为了解决这个问题,人们提出了下面的特征选择方法:
把上述所有加起来,就得到了CRF模型:
这种简单的CRF模型可通过多种方式改进:
- 特征函数q和\nu可以设计得更加复杂,例如考虑图片的形状和纹理,或者依赖于图像的全局特征而不是局部区域;
- 可以使用标签之间更加复杂的图结构而不是网格(grid),譬如可以根据标签区域定义因子(factor)。
三、相关工作¶
近年来已有许多研究者将CRF 应用于 pixel-wise 的图像标记(其实就是图像分割),从而实现分割边界的平滑化,进而提升正确率。例如Koltun等人使用全连接CRF、高斯核线性组合来定义边界能量实现的像素级图片标注任务,实验结果大幅改进了图像分割和标注的正确率3。接着,S Zheng等人通过将CRF实现为RNN,在模型优化过程进行端到端训练进一步提高了标注效果。2他们主要是利用条件随机场构造图像分割能量函数:
这里的E可以理解为能量,也就是cost。其中\varphi_u(x_i)是将像素i标记为x_i的inverse likelihood,也就是2.3中的特征函数f(y_i,x_i),\varphi_p(x_i.x_j)是将i、j同时标记为x_i、x_j的能量,即2.3中的特征函数g(y_i.y_j,x_i,x_j)。对于CRF在计算机视觉中的应用,相信未来还会有更多探索。
四、参考文献¶
-
Sutton, Charles, and Andrew McCallum. "An introduction to conditional random fields." arXiv preprint arXiv:1011.4088 (2010). ↩
-
Zheng, Shuai, et al. "Conditional random fields as recurrent neural networks." Proceedings of the IEEE International Conference on Computer Vision. 2015. ↩
-
Koltun, Vladlen. "Efficient inference in fully connected crfs with gaussian edge potentials." Adv. Neural Inf. Process. Syst (2011). ↩